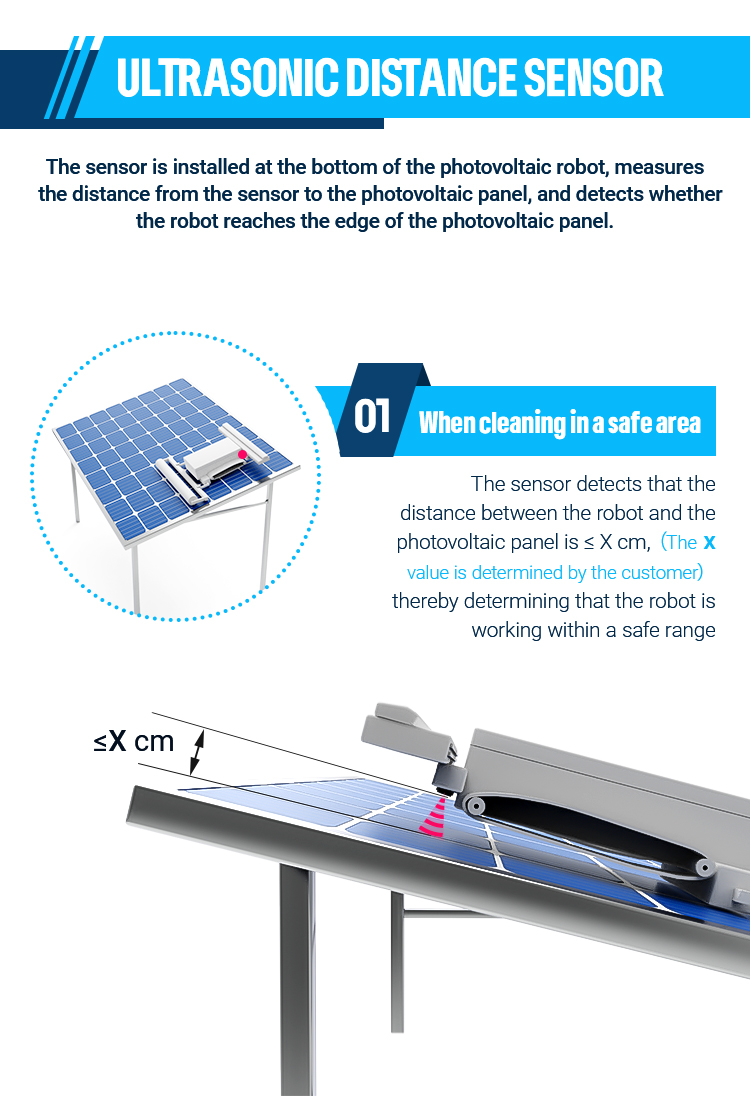
Ултразвуков сензор за разстояние
Сензорът е инсталиран в долната част на фотоволтаичния робот, измерва разстоянието от сензора до фотоволтаичния панел и открива дали роботът достига ръба на фотоволтаичния панел
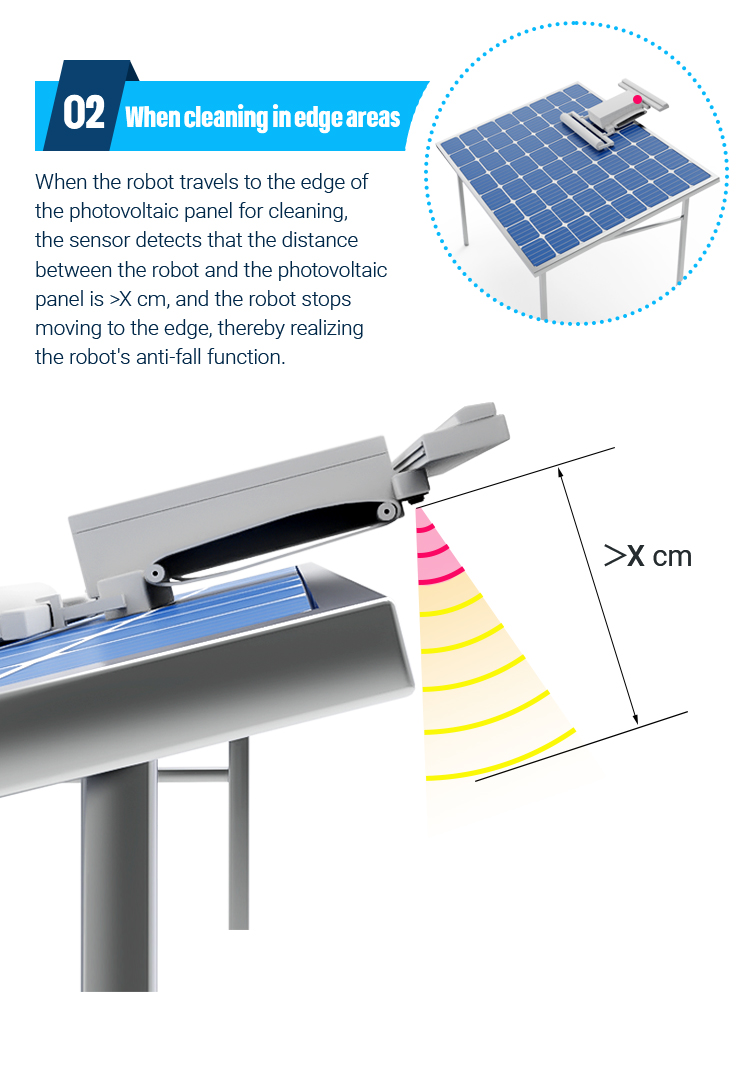
Фотоволтаичният почистващ робот работи в режим на свободно ходене върху фотоволтаичните панели, което лесно пада и поврежда оборудването; пешеходната пътека се отклонява, което засяга ефективността. С помощта на сензор за обхват можете да наблюдавате дали роботът е окачен във въздуха и да му помогнете да върви в центъра.